Le capteur méduse expérimenté en Île-de-France pour identifier les véhicules trop bruyants
21/08/2019
D’après l’étude Crédoc pour Bruitparif conduite en 2016, le bruit des véhicules deux-roues motorisés représente, pour 35% des Franciliens, le bruit le plus gênant parmi les différents modes de transport. Toujours d’après cette même étude, 87% de la population d’Île-de-France est favorable à un renforcement des contrôles et des sanctions concernant les deux-roues motorisés excessivement bruyants.
La problématique des nuisances sonores générées par les véhicules deux-roues motorisés a également été inscrite dans la feuille de route 2016-2019 de la commission santé-environnement du Conseil national du bruit, commission que dirige Fanny Mietlicki, directrice de Bruitparif.
C’est dans ce contexte et afin de répondre à la cette forte demande sociétale que Bruitparif a inscrit dès 2018, dans son programme d’actions 2019, l’expérimentation de son capteur innovant « méduse » aux fins d’identification des véhicules excessivement bruyants, notamment certains deux-roues motorisés.

Le capteur « méduse »
Ce capteur, développé par Bruitparif dès 2016 et breveté, permet, outre la caractérisation des niveaux sonores en temps réel, de déterminer avec précision l’origine du bruit et d’apporter ainsi la preuve de la source de la nuisance par représentation de la direction de provenance dominante du bruit à chaque instant sur une vue à 360° prise par un capteur optique intégré dans la « méduse ».
Pour faire cela, le capteur comporte une antenne acoustique composée de quatre microphones disposés selon un tétraèdre régulier. Cette multiplicité de microphones permet de détecter de petits décalages temporels lors de l’arrivée du son, qui sont suffisants pour permettre de reconstituer plusieurs fois par seconde la direction du bruit dominant. Il devient alors possible d’affecter un niveau de bruit à une direction particulière dans l’espace, ce qui permet ensuite de répondre à une question essentielle : d’où provenait principalement le bruit durant tel intervalle de temps ?
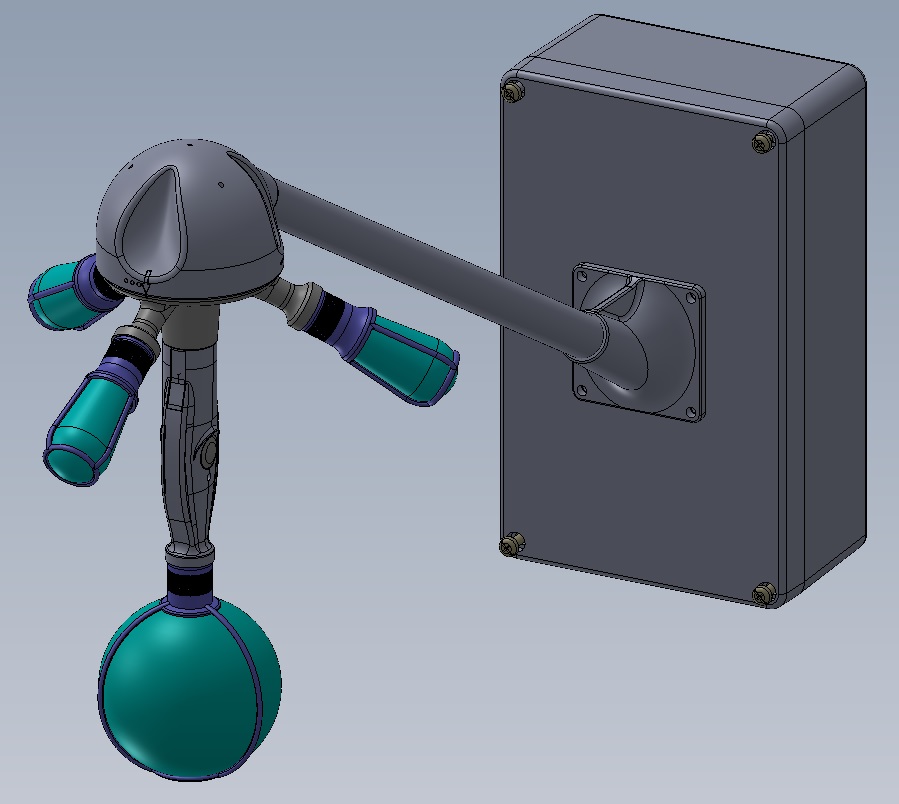
Schéma de principe du capteur méduse (version 2019), avec ses quatre microphones positionnés selon un tétraèdre régulier et ses capteurs optiques au centre (crédits : Bruitparif)
En projetant ensuite ces « niveaux localisés » sur une visualisation à 360° de l’environnement, il devient alors possible de « voir le bruit ». Au sein des visualisations produites, les niveaux sonores provenant de chaque direction sont représentés sous la forme d’hexagones ou de points, colorés en fonction de l’intensité des niveaux sonores mesurés.

Visualisation de la trace acoustique générée par le passage d’une moto (crédits : Bruitparif)
Les applications déjà opérationnelles de la « méduse »
Ce capteur offre des perspectives d’application multiples. Il est déjà utilisé avec succès, depuis plusieurs mois, dans deux contextes opérationnels :
- l’aide à la gestion de la tranquillité publique au sein des quartiers animés de la capitale (voir site http://monquartier.bruitparif.fr) ;
- la mesure et l’information sur le bruit généré par les chantiers de construction du Grand Paris Express (voir site http://chantiers.sgp.bruitparif.fr).
De premiers tests réalisés à échelle réduite ont également démontré les potentialités du capteur à localiser et analyser avec précision les niveaux de bruit générés par des sources mobiles (trafic aérien, routier ou ferroviaire) ou fixes (activités industrielles ou commerciales, systèmes de ventilation/climatisation) permettant ainsi d’ouvrir la voie à d’autres contextes d’utilisation opérationnelle. Parmi celles-ci, la détermination des véhicules excessivement bruyants.
Un dispositif expérimental : la détection des niveaux de bruit générés par les véhicules
Bruitparif vient ainsi de lancer, à l’été 2019, l’expérimentation de son capteur « méduse » pour la détermination des niveaux de bruit générés par les véhicules. Les objectifs sont multiples.
Il s’agit, dans un premier temps, de constituer une base de données scientifiques relatives aux niveaux sonores générés par les différents types de véhicules dans différents contextes de circulation, afin d’objectiver les nuisances et d’améliorer les connaissances sur les niveaux réels émis par les engins en circulation. Cette base de données pourra notamment servir à affiner ou valider les données d’entrée des modèles utilisés pour produire les cartes de bruit routier, telles qu’exigées par la directive européenne 2002/49/CE et qui doivent être revues tous les 5 ans (la prochaine version - dite de quatrième échéance - devra être produite et adoptée par les autorités compétentes avant juin 2022, en appliquant la nouvelle méthode européenne harmonisée CNOSSOSS - elle nécessitera notamment de tenir compte du bruit des véhicules deux-roues motorisés, ce qui n’était pas le cas jusqu’à présent).
Il pourra s’agir également d’améliorer la sensibilisation des conducteurs aux nuisances sonores qu’ils génèrent via la mise en place d’afficheurs pédagogiques incitatifs. L’idée est de fournir une information simple et opérationnelle aux conducteurs, un peu à l’image des radars pédagogiques de vitesse, mais ici pour le bruit.
Enfin, ce capteur pourrait à terme évoluer vers un radar acoustique pour identifier et sanctionner les engins motorisés excessivement bruyants du fait d’une conduite en surrégime, d’une vitesse excessive, d’un débridage (fréquemment effectué sur les cyclomoteurs - < 50 cm3 pour augmenter leur performance), de l’utilisation de pot d’échappement non homologué, modifié ou dont la chicane a été enlevée sur les motos. Les députés ont en effet récemment ouvert la voie au développement et à l’expérimentation de tels dispositifs de contrôle automatique pour le bruit, dans le cadre de la loi d’orientation sur les mobilités qui devrait être prochainement promulguée (voir amendement n°2984 défendu par le député Jean-Noël Barrot et ses collègues qui a été adopté).
Pour initier cette expérimentation, plusieurs sites ont été sélectionnés par Bruitparif en Île-de-France afin de tester le capteur dans différents contextes de circulation et de typologie de voirie. Cinq capteurs « méduse » sont prévus d’y être déployés d’ici la fin de l’année 2019 : deux le long de la RD91 en Vallée de Chevreuse (78), deux dans Paris (75) et un à Villeneuve-le-Roi (94).
Premières installations sur la RD91 en Vallée de Chevreuse (78)
Les premières installations ont débuté le long de la RD91 avec la mise en place, le 15 juillet 2019, d’un premier capteur à Saint-Forget. Cette route départementale, aussi appelée « route des 17 tournants » en raison de sa sinuosité, est très fréquentée le week-end et les jours fériés par les motocyclistes ou les conducteurs de voitures sportives. Cela engendre une pollution sonore importante et une gêne ressentie singulièrement par les riverains.

Vue du capteur méduse installé le long de la RD91 au niveau de la commune de Saint-Forget en vallée de Chevreuse (crédits : Bruitparif)
Ce secteur du territoire de la Communauté de Communes de la Haute Vallée de Chevreuse (CCHVC) a été retenu par l’association Bruitparif, suite à la campagne de mesure qu’elle y avait réalisée en juillet 2018 en réponse à la sollicitation de certains élus et responsables associatifs. Sur les six secteurs instrumentés lors de cette campagne de mesure à Voisins-le-Bretonneux, Saint-Lambert des Bois, Saint-Forget, Dampierre et Senlisse, de 210 à 520 pics de bruit générés par des motards avaient ainsi été relevés au cours de la journée du dimanche 8 juillet 2018, avec des émergences parfois très importantes (voir article publié en janvier 2019 à ce sujet).
Afin de caractériser de manière plus exhaustive l’impact sonore de certaines catégories d’utilisateurs routiers mais aussi de mener une action de sensibilisation en direction des utilisateurs concernés, Bruitparif et la CCHVC ont signé, le 12 juin 2919, une convention de partenariat afin de réaliser une expérimentation de mesure et d’identification des véhicules bruyants à l’aide de deux capteurs « méduse » installés l’un à Saint-Forget et l’autre à Saint-Lambert des Bois, sur une période de 18 mois (juillet 2019 à décembre 2020), accompagnée du test d’afficheurs pédagogiques.
un dispositif qui s’avère d’ores et déjà très prometteuR
Les premières données disponibles sur le site de Saint-Forget s’avèrent très prometteuses quant à la capacité du dispositif à identifier avec précision les niveaux de bruit générés par les véhicules, y compris dans des contextes compliqués où plusieurs véhicules se succèdent dans un laps de temps court.
Le logiciel expert de supervision mis au point par Bruitparif permet ainsi de visualiser les traces acoustiques des engins qui ont emprunté la route départementale.
Explications à l’aide d’un cas concret :
Sur la capture d’écran ci-dessous, sont représentés en haut à droite les variations du niveau sonore sur un quart d’heure (entre 16h14 et 16h31 le dimanche 28 juillet 2019), et sur la partie basse de l’écran un zoom sur le pic de bruit identifié autour de 16h30. Comme on peut le voir sur la partie basse de l’écran à gauche, ce pic de bruit correspond au passage de trois engins motorisés qui sont passés, en moins de trois secondes d’intervalle, devant le capteur, en suivant une trajectoire allant de la droite (angle d’azimut à 90°, angle d’élévation tendant vers 0) vers la gauche (angle d’azimut à -90°, angle d’élévation tendant vers 0). L’analyse couplée des angles de provenance du bruit et du niveau sonore permet de déterminer avec précision le niveau sonore généré par chacun des engins à l’instant de leur passage au droit du capteur (cet instant peut être déterminé précisément et automatiquement par analyse des angles de provenance du bruit, il correspond au moment où l’angle d’azimut est égal à 0 et l’angle d’élévation est minimal, le capteur « méduse » étant placé en surélévation par rapport à la voirie) : ainsi, la première moto qui est passée précisément a 16:30:01 a généré un niveau maximal au passage de 86 dB(A) alors que les deux motos suivantes, passées respectivement à 16:30:02 et 16:30:03 ont généré chacune un niveau de 83 dB(A). La visualisation disponible sur la partie basse à droite permet de rendre compte des traces acoustiques générées par le passage des véhicules, par projection, sur une image à 360° de l’environnement, de points de couleur correspondant à la direction de provenance dominante du bruit chaque dixième de seconde, la couleur dépendant du niveau sonore mesuré (plus la couleur tend vers le violet foncé et plus le niveau sonore est important).
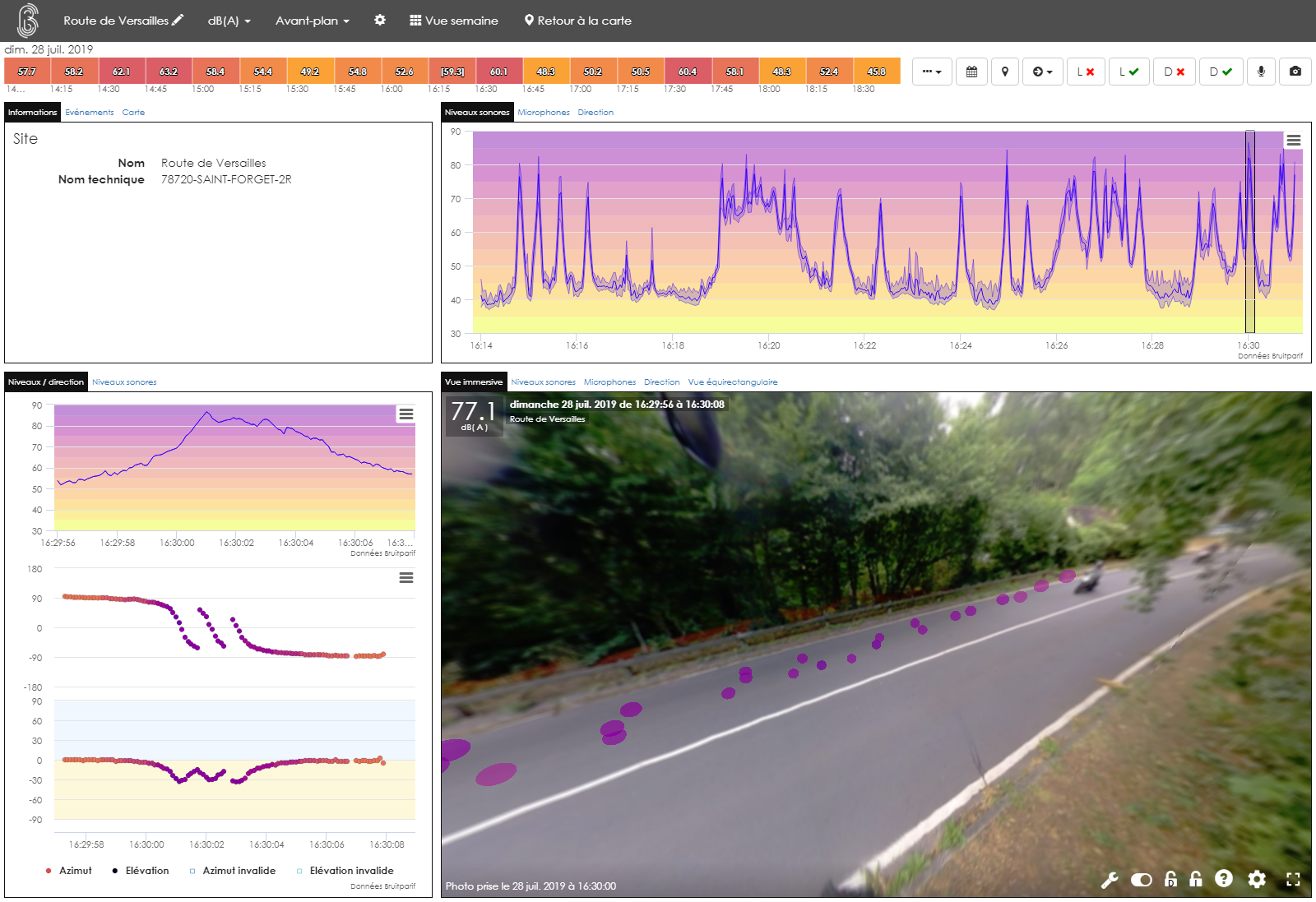
Capture d’écran du logiciel expert de supervision de Bruitparif permettant d’analyser les données collectées par les capteurs « méduse » (crédits : Bruitparif)