Le radar sonore Hydre
Conçu par Bruitparif, le prototype de radar sonore « Hydre » à visée de contrôle-sanction des véhicules trop bruyants est testé depuis 2022 sur plusieurs sites en Île-de-France dans le cadre d’une expérimentation encadrée au niveau national.

Radar sonore « Hydre » déployé le long de la RD5 à Villeneuve-le-Roi
Description
Le radar sonore « Hydre » combine deux dispositifs acoustiques inspirés de la technologie brevetée dans le capteur « Méduse » et tous les éléments techniques permettant de détecter les infractions relatives au bruit routier (voir figure ci-dessous).
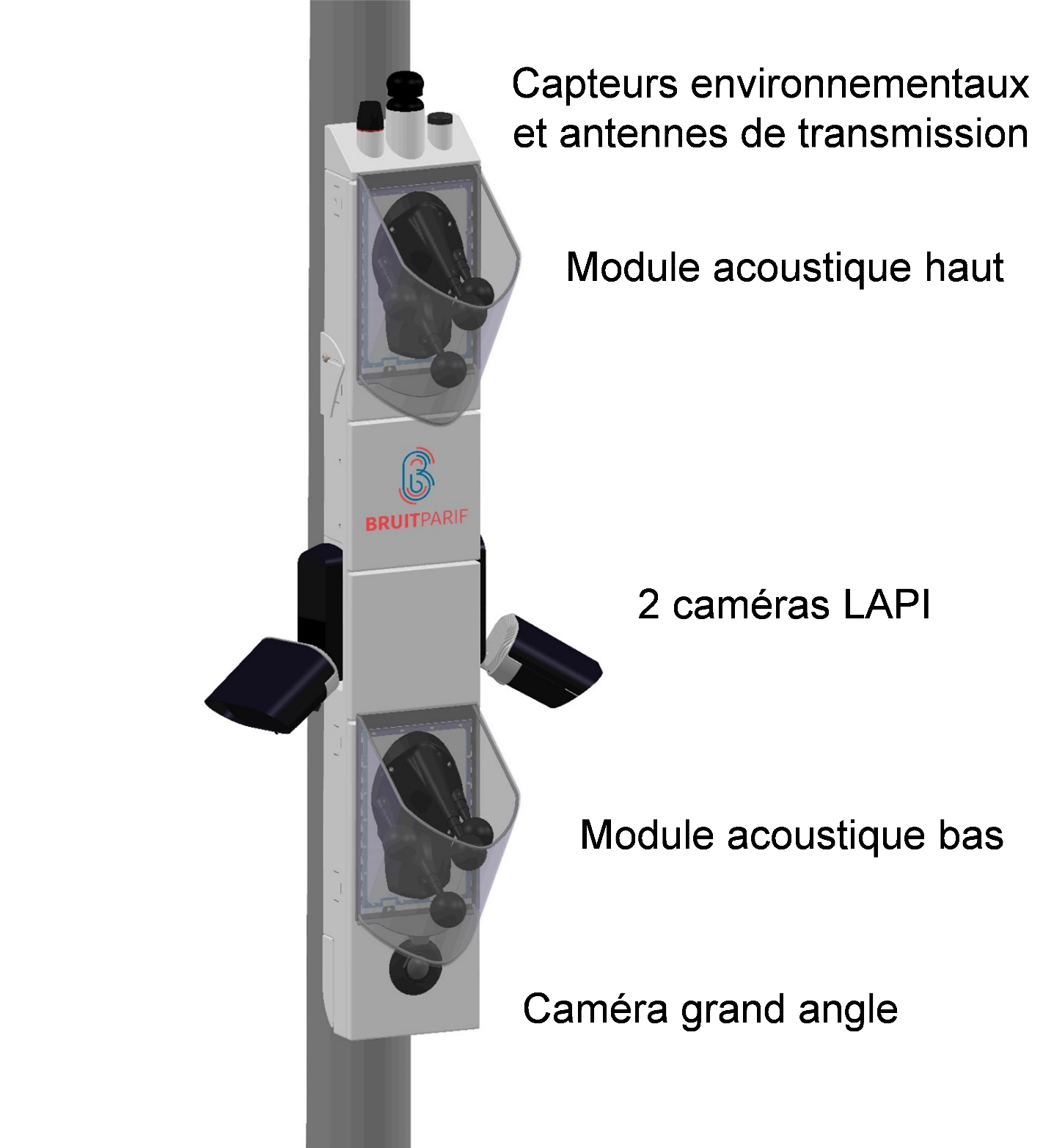
Radar sonore « Hydre » conçu par Bruitparif
Chaque module acoustique est composé de quatre microphones capables de calculer, 25 fois par seconde, des niveaux sonores et des angles de provenance du bruit. Ces capteurs sont hébergés chacun au sein d’une cage métallique acoustiquement transparente qui permet de les protéger des potentiels actes de vandalisme.
Le radar sonore « Hydre » intègre aussi une caméra grand-angle (180°) afin de pouvoir réaliser une photo de la scène complète au moment de la potentielle infraction, ainsi que deux caméras dédiées à la lecture automatisée de plaque d’immatriculation (LAPI) par l’avant et l’arrière du véhicule ou dans chaque sens de passage. Le prototype comporte également des dispositifs annexes (capteurs environnementaux et antennes de transmission).
L’ensemble des composants du radar sonore « Hydre » est hébergé au sein d’une structure métallique sécurisée qui contient également l’unité centrale de traitement et de télétransmission sécurisée et chiffrée des données. Tous les traitements sont réalisés au sein de l’appareil et ne nécessitent aucun recours à un système extérieur.
Principe de fonctionnement
Le premier traitement réalisé consiste à croiser les informations des deux modules acoustiques pour déterminer toutes les 40 ms le niveau sonore généré par la source de bruit dominant ainsi que la distance à laquelle celle-ci se trouve afin de pouvoir déterminer le bruit émis par le véhicule comme s’il était mesuré à une distance standard de référence (7,6 m). Pour que la détermination soit valide, les deux dispositifs acoustiques doivent focaliser simultanément sur la même source (voir figure ci-dessous), et pour un nombre de points de mesure le long de la trajectoire emprunté par le véhicule suffisamment nombreux au regard de critères de représentativité intégrés dans la chaîne de traitement.
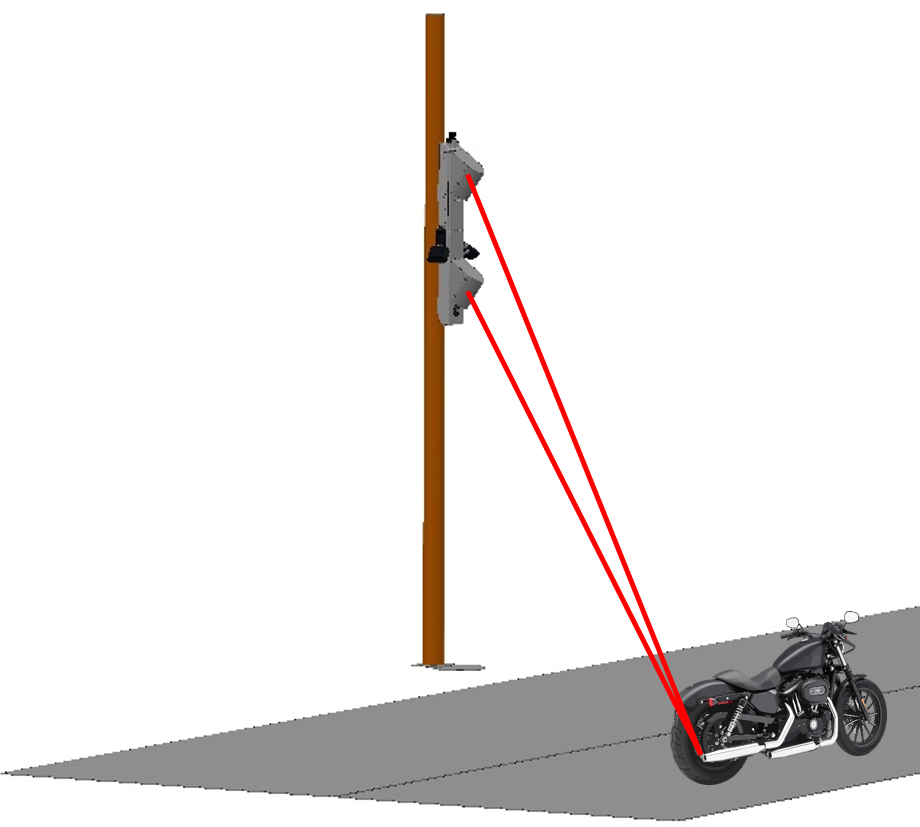
Principe de la focalisation opérée par « Hydre » à l’aide de ses deux modules acoustiques
Lorsque ce niveau sonore « corrigé » à 7,6 mètres dépasse le seuil de déclenchement fixé, et si les conditions environnementales sont réunies, un dossier d’infraction potentiel est ouvert au sein du radar sonore « Hydre ». Le traitement automatisé récupère alors auprès de la caméra grand-angle quelques secondes de vidéo avant et après l’instant considéré comme le plus significatif de l’infraction. Il procède à une analyse automatique de l’ensemble des images de la séquence de manière à déterminer à chaque instant la position de tous les véhicules présents dans la scène afin d’en reconstituer la trajectoire.
Les trajectoires constatées à partir de l’analyse d’images sont ensuite rapprochées de la trajectoire acoustique dominante afin de déterminer quel véhicule est à l’origine du dépassement sonore. Lors de ce rapprochement, les situations potentielles de confusion sont éliminées. L’appareil ne prend ainsi pas en compte les situations où plusieurs véhicules se trouvent à un instant donné dans la direction de la source acoustique détectée comme dominante, pas plus que les situations où il y aurait absence de véhicule dans la direction incriminée, etc.
S’il reste suffisamment de points valides de mesure en dépassement avec un véhicule bien identifié, l’infraction peut être considérée comme constituée. Une image de contexte (voir figure ci-dessous) est donc extraite afin d’être ajoutée au dossier. Celle-ci fait figurer un cadre autour du véhicule responsable du dépassement sonore ainsi que la zone de provenance du bruit dominant (sous la forme d’un point entouré d’un cercle), ce qui matérialise le fait que c’est bien ce véhicule qui est la source de l’émission sonore excessive.

Exemple d’image de contexte prise par « Hydre »
Le traitement interroge ensuite les caméras LAPI afin de récupérer les images du véhicule concerné avec sa plaque d’immatriculation lisible. La plaque d’immatriculation est également lue automatiquement. L’ensemble de ces éléments sont ajoutés au dossier d’infraction potentielle qui peut alors être télétransmis de manière chiffrée vers un centre habilité pour contrôler ce type d’infractions sonores.
Résultats de la phase 1 de l’expérimentation
Entre janvier 2022 et octobre 2022, s’est déroulée la phase 1 de l’expérimentation nationale qui a consisté en l’équipement d’axes routiers avec les prototypes de radar sonore développés par trois fabricants (Acoem, Bruitparif et MicrodB).
8 sites ont été sélectionnés au sein de 7 collectivités : Paris (2 sites : rue Cardinet dans le 17ème et rue d’Avron dans le 20ème), Rueil-Malmaison, Villeneuve-le-Roi, Communauté de communes de la Haute Vallée de Chevreuse, Bron, Nice, Toulouse.
Il s’agissait d’éprouver le fonctionnement des systèmes dans les conditions réelles de circulation mais sans constatation d’infraction ni verbalisation à ce stade.
Bruitparif a déployé son prototype de radar sonore « Hydre » sur trois sites en Île-de-France : rue d’Avron dans Paris 20ème, le long de la RD5 à Villeneuve-le-Roi et le long de la RD46 à Saint-Lambert des Bois.

Le radar sonore “Hydre” installé sur trois sites pilote rue d’Avron à Paris 20ème (à gauche), le long de la RD5 à Villeneuve-le-Roi (au milieu) et le long de la RD46 à Saint-Lambert des Bois en Vallée de Chevreuse (à droite)
À l’issue de cette première phase, Bruitparif juge les résultats obtenus avec sa technologie très encourageants, notamment du fait qu’il est possible pour Hydre de détecter les véhicules excessivement bruyants dans une zone d’environ 15 mètres de part et d’autre du radar, et ce, même dans une scène complexe avec plusieurs véhicules présents simultanément.
Ainsi, durant la période de test, Hydre a été capable de détecter, selon les sites et leur volume de trafic, entre 10 et 44 véhicules en moyenne par jour qui ont émis un bruit au passage supérieur au seuil de détection de 83 dB(A) qui avait été fixé pour cette première phase d’expérimentation. Reste à savoir quelle valeur (probablement comprise entre 83 et 90 dB(A)) sera retenue à terme par le Ministère pour fixer le seuil qui conduira à la constatation d’infraction. Plus ce seuil sera élevé et moins il y aura d’infractions de constatées (voir figures ci-dessous).
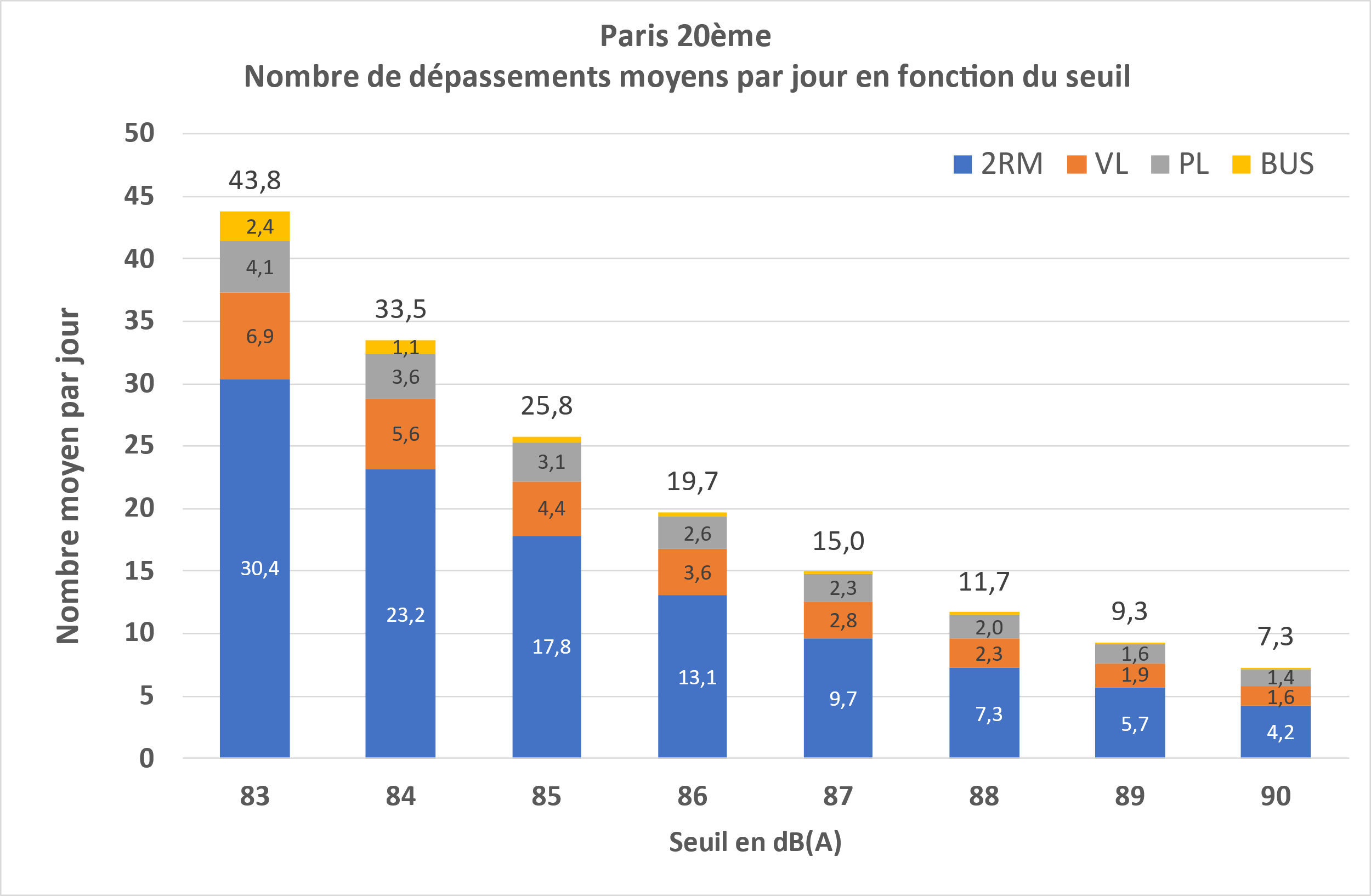
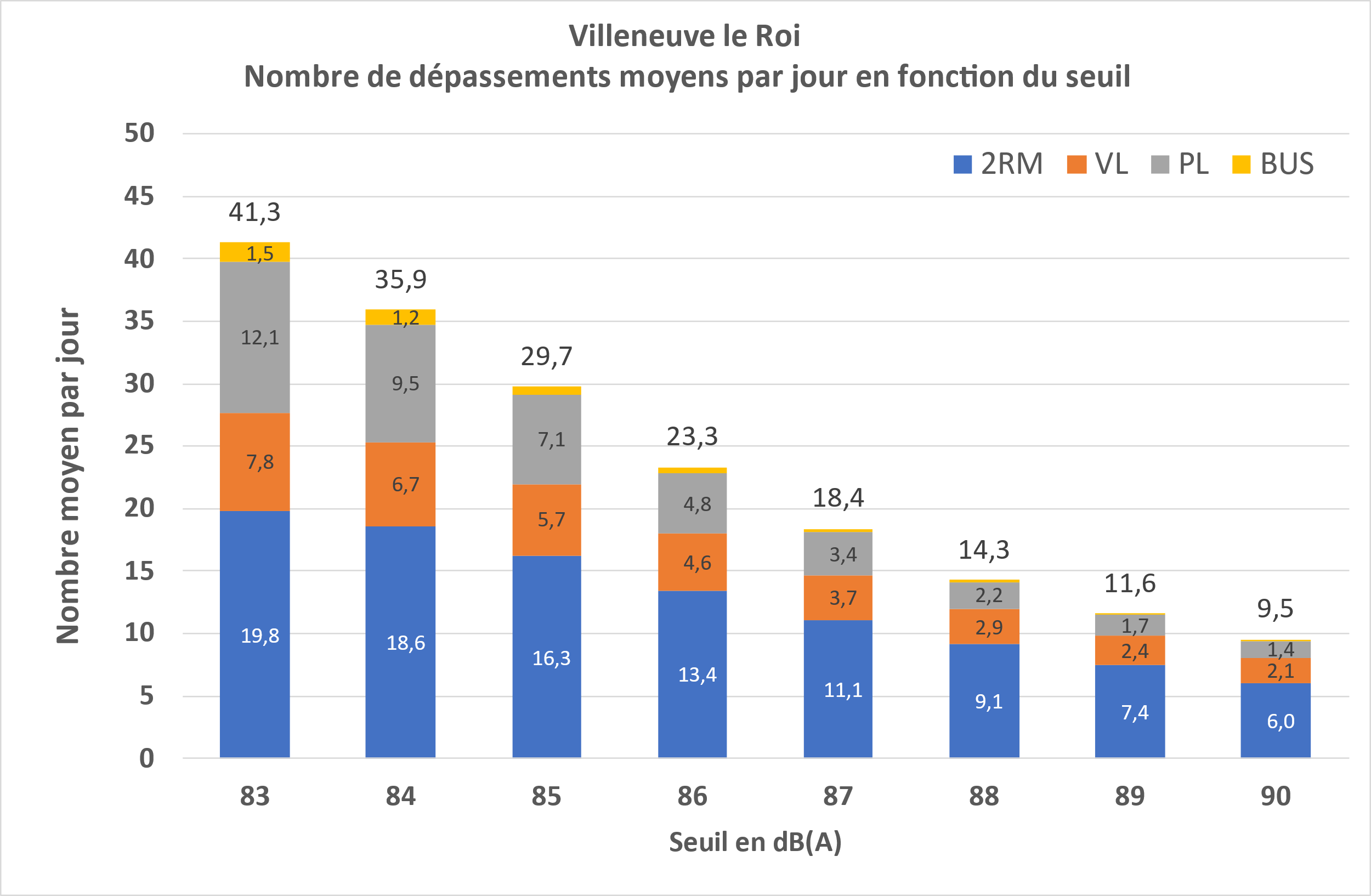
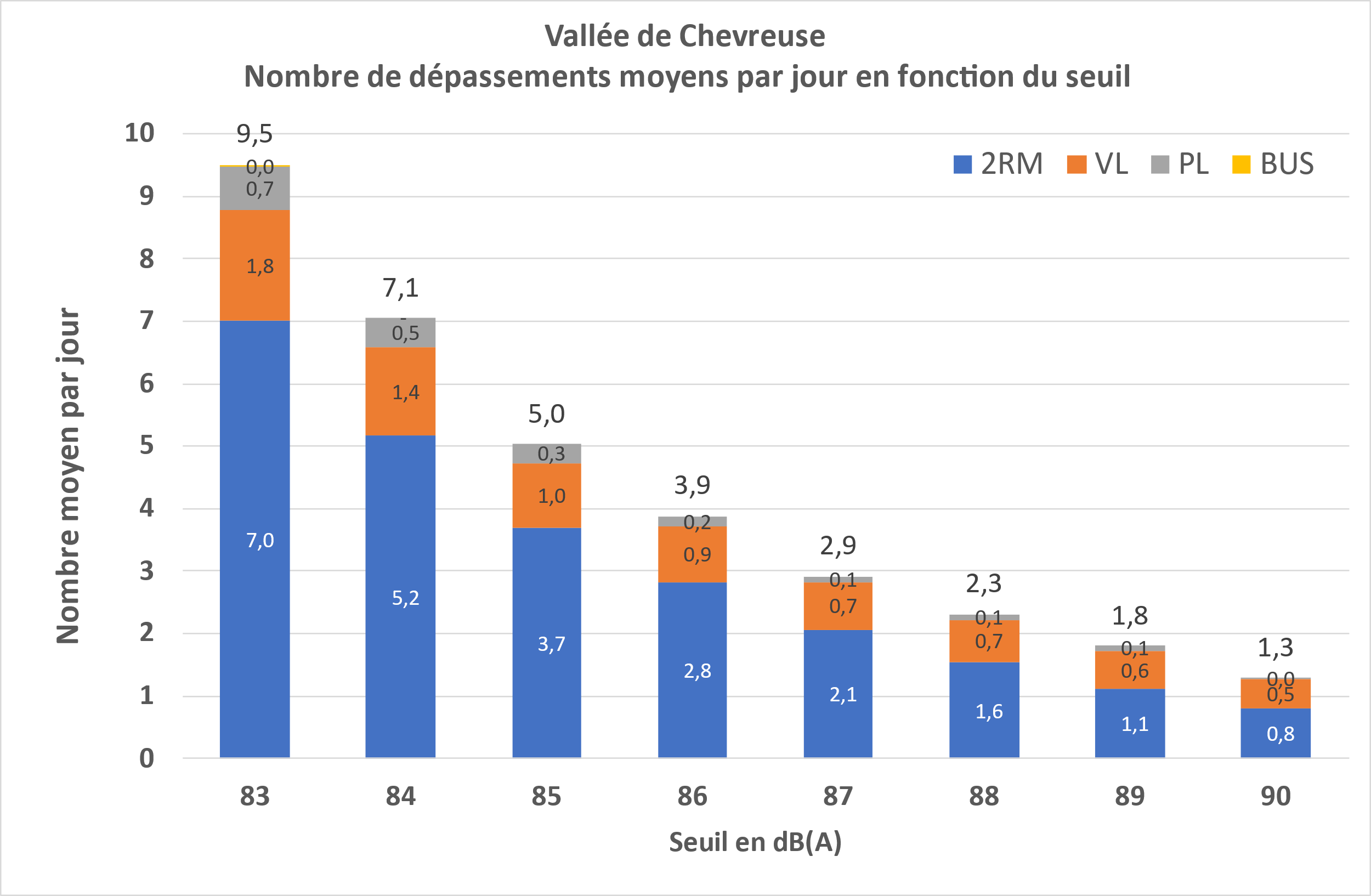
Nombre de dépassements moyens détectés par jour sur chacun des sites équipés avec le prototype de radar sonore HYDRE de Bruitparif, et ce en fonction des valeurs potentielles du seuil qui sera fixé à terme pour la constatation des infractions
Primé aux décibels d’Or 2024
Le radar sonore Hydre de Bruitparif a été primé dans la catégorie Recherche lors des décibels d’Or 2024.

Crédits : Conseil national du bruit
Pour Olivier Blond, Président de BRUITPARIF et délégué spécial à la santé environnementale à la Région Île-de-France, « Le radar sonore Hydre va permettre de doter les acteurs territoriaux d’une solution pour lutter avec beaucoup plus d’efficacité contre les comportements inciviques d’une minorité d’automobilistes et de motards qui font vrombir leurs engins et troublent ainsi la quiétude de millions de nos concitoyens. »
Il poursuit : « Ce nouveau prix récompense le talent et l’inventivité des ingénieurs de BRUITPARIF, après celui qui avait récompensé la mallette Kiwi (lauréate des Décibels d’Or 2016) et le capteur Méduse (lauréat des Décibels d’Or 2019) ».
Perspectives
Bruitparif a décidé de poursuivre l’aventure en soumettant son dispositif aux tests d’homologation en métrologie légale auprès du Laboratoire national de métrologie et d’essais (LNE). Ces tests devraient se dérouler jusqu’à début 2025.
Si l’homologation d’Hydre est obtenue, il sera ensuite possible de le redéployer sur les sites pour procéder à la deuxième phase opérationnelle de l’expérimentation nationale, qui comportera cette fois-ci la constatation des infractions et la verbalisation. Celle-ci est prévue de se dérouler sur l’année 2025.
En attendant, Hydre continue d’être éprouvé sur le terrain au sein d’autres grandes villes européennes : Berlin, Genève, Bruxelles et Barcelone ont déjà pu l’expérimenter.